The North Carolina Zoo needed a feeding system that could better support the natural behaviors of their small reptiles. Their existing process required staff to hand‑deliver food on a strict schedule, which limited how realistically feeding times could mimic natural patterns and placed a heavy demand on human work hours. The challenge was to create an automated feeder that could introduce food in a natural pattern at varying intervals while reducing daily labor.
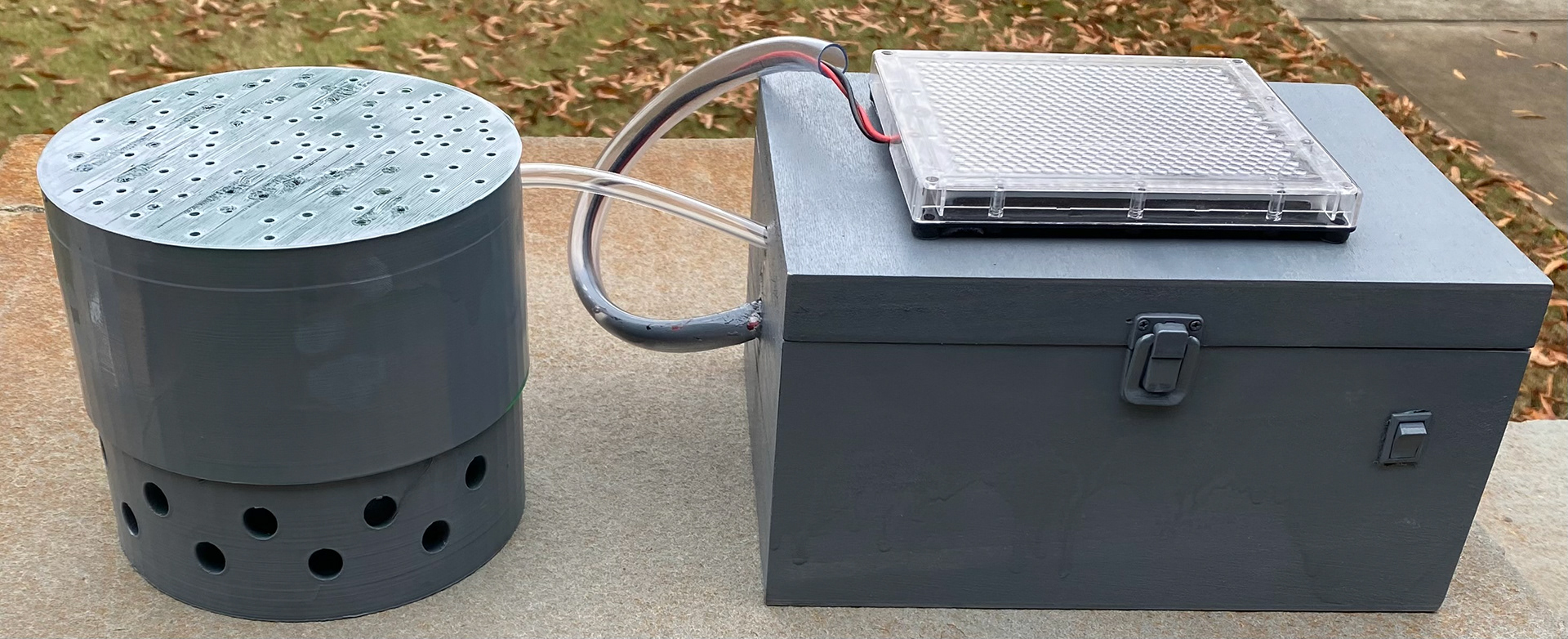
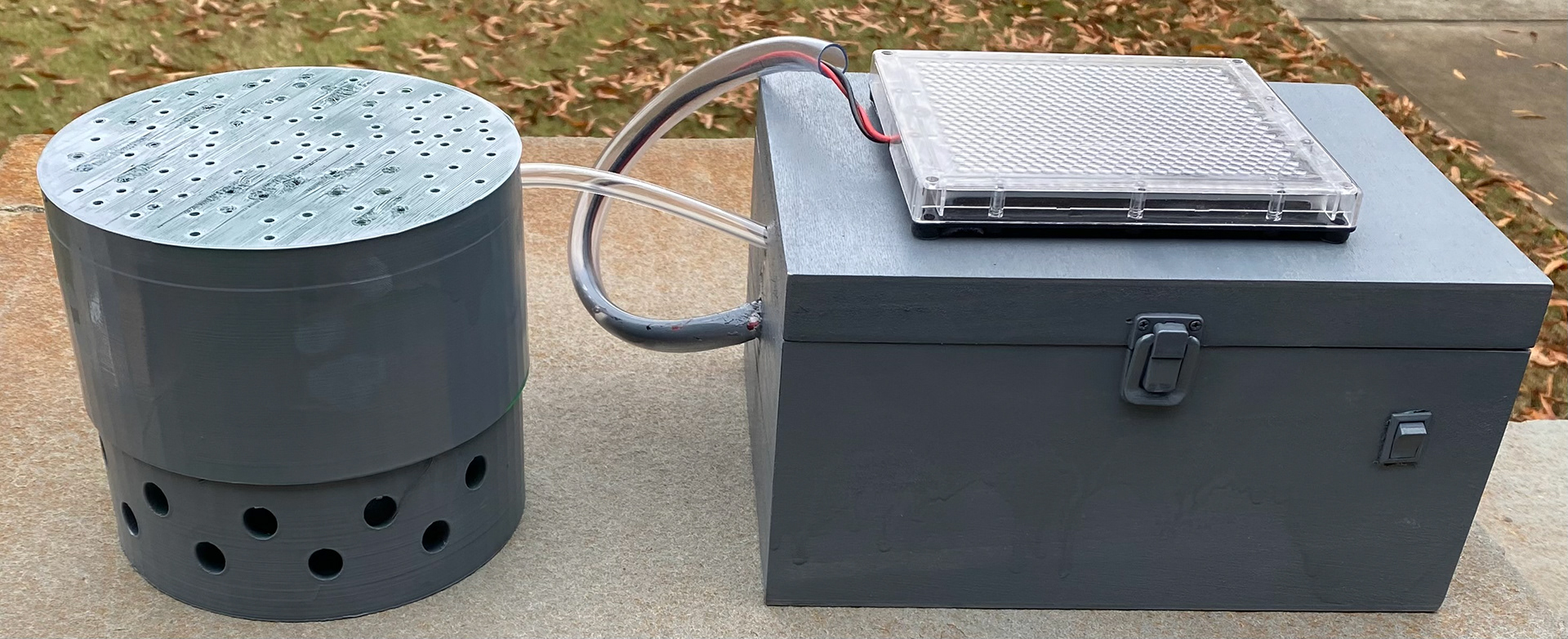
Final Feeder Prototype Assembly
Initial Designs
The first concept was a rotating compartment system designed to deliver food at randomized intervals. While the mechanism successfully created variation in feeding times, the main challenge was developing a design that remained functional without disrupting the natural appearance of the reptiles’ habitats and could operate for extended periods without needing to be recharged or have its batteries replaced.

Low Fidelity Prototype
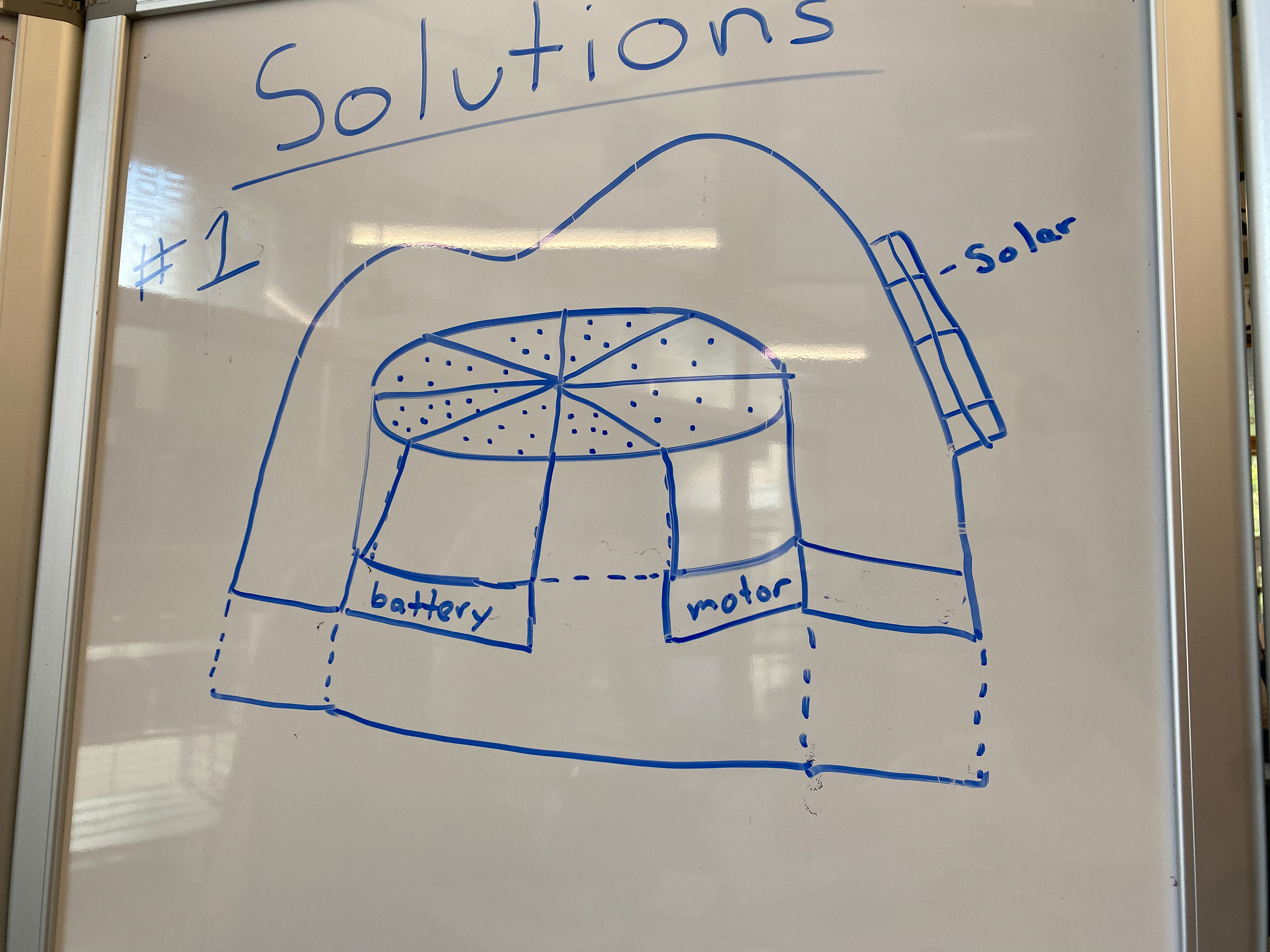
Idea Sketch
Prototypes
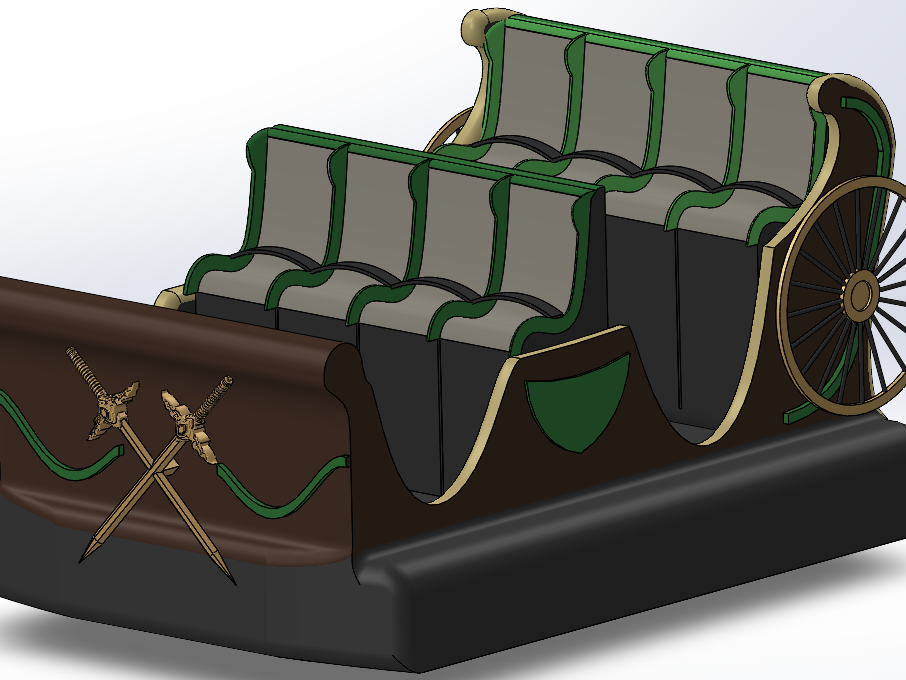
After researching existing automated feeder designs, I created detailed CAD models of the system in OnShape. The components were then 3D printed, assembled, and tested to evaluate functionality and identify areas for improvement.
The system was equipped with a solar panel and a charge controller that continuously recharged the battery throughout the day, allowing the feeder to operate with minimal maintenance.
An Arduino program was developed to drive the stepper motor and rotate the compartment system at randomized intervals, typically between 30 and 45 minutes per rotation. This variability helped mimic natural, unpredictable feeding patterns.

32 Compartment Design
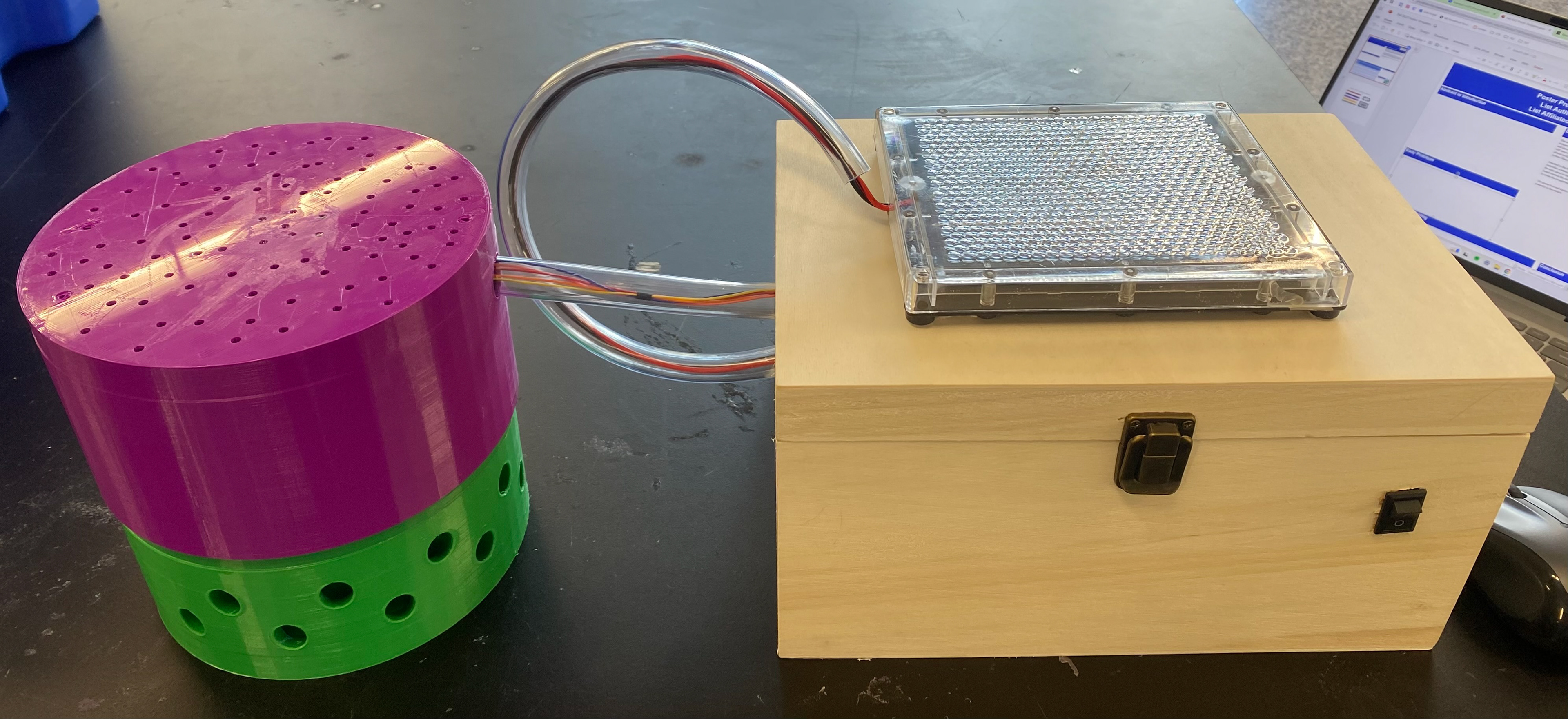
First Full Prototype Assembly with Solar Charge System
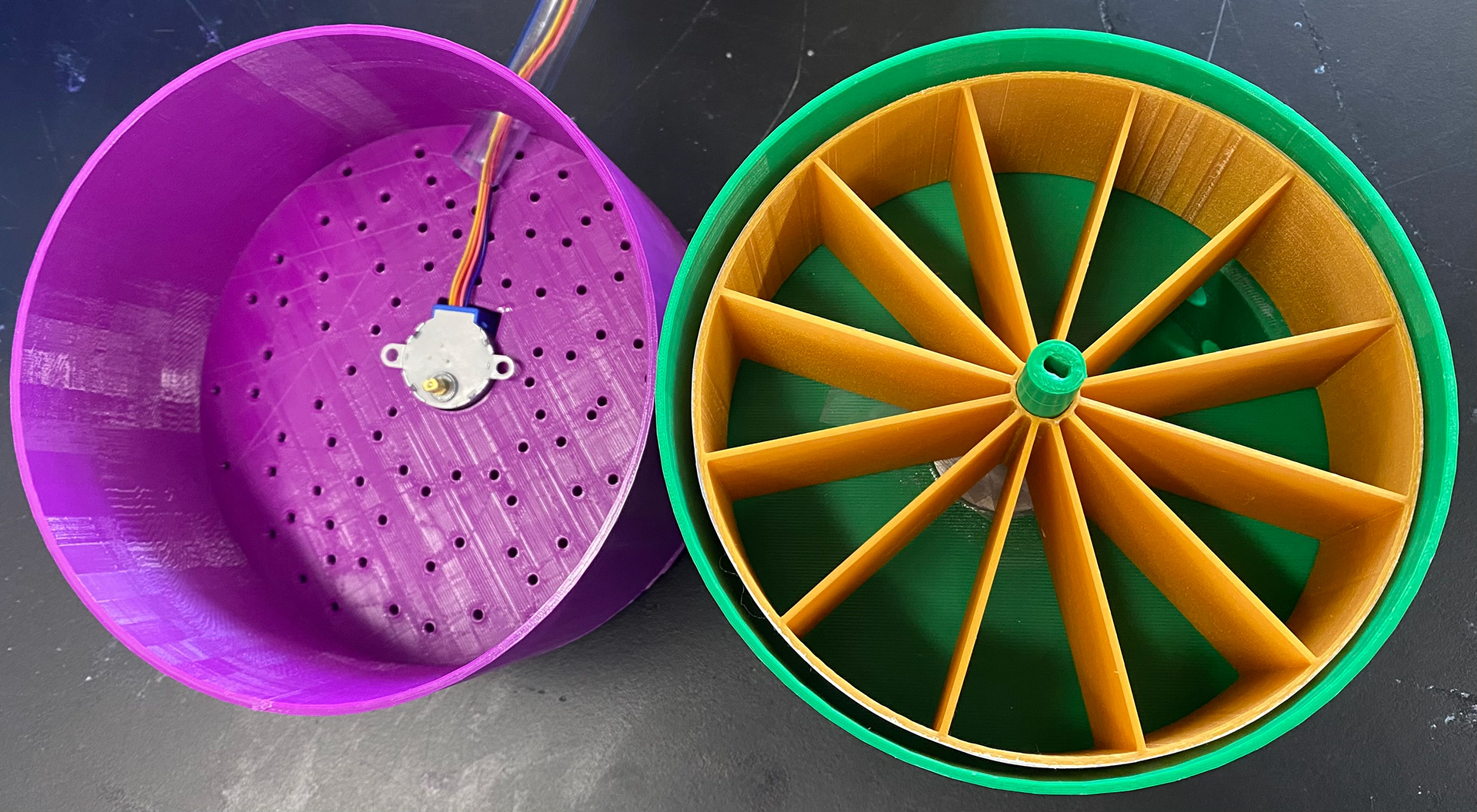
12 Compartment Feeder Design
Final Design